| 發刊日期 |
2019年12月
|
|||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 標題 | 莫耳圓與二階張量關係之研究及其 Mathematica 動畫模擬 (上) |
|||||||||||||||||||||||||||||||||||||||
| 作者 | ||||||||||||||||||||||||||||||||||||||||
| 關鍵字 | ||||||||||||||||||||||||||||||||||||||||
| 檔案下載 | ||||||||||||||||||||||||||||||||||||||||
| 全文 |
摘要: 本文第一作者係台灣工業與應用數學會(TWSIAM)副理事長, 從事工程數學教育二十餘年, 發現工程師不甚了解張量, 數學家不熟悉莫耳(Mohr)圓, 而少了跨領域的交流, 本文即在此前提動機下寫成。 本文係探討莫耳圓與二階張量關係。 為打破張量艱澀難懂之迷思, 不落窠臼, 加強學子學習成效, 將莫耳圓與二階張量在力學與數學兩方面建立系統性思考。 從張量角度出發, 輔以莫耳圓、分量式與矩陣式三種形式推導, 並探討二階張量與莫耳圓間之等價關係。 再引至不變量與固有值問題探討, 建立材料力學中樑受彎曲時斷面強軸、弱軸與主應力、 主應變概念, 並可說明為何工字樑或 I 型樑在土木工程上相當普遍。 本文將物理量分析(慣性矩、 應力與應變)、 幾何圖示(莫耳圓)與數學思維(張量)相融合, 引導學生將材料力學與工程數學融會貫通。 希冀無論在教師教學或學生學習上, 都能有實質幫助, 使張量不再令人望而卻步。 在此透過連結數學張量與工程力學架構, 讓讀者能有溫故知新的收穫。 最後, 以 Mathematica 符號運算軟體的動畫模擬功能為輔助, 以動畫呈現觀察座標系統改變情況下, 各物理量分量之變化與莫耳圓中不變量之驗核。 關鍵字: 莫耳圓、 二階張量、 Mathematica 動畫。 1. 前言自然界中諸多物理量均是張量, 若以不同觀察座標系統描述, 其分量間可滿足某種轉換關係。 以統一的數學觀點來說, 滿足某種特殊轉換關係的物理量, 可稱之為張量。 例如: 純量即為零階張量(如:能量、溫度與長度)、 向量則為一階張量(如 : 力、 位移、 速度與加速度)、 二階張量 (如 : 應力、 應變與慣性矩)、 四階張量 (如 : 組成律張量)等與其他更高階張量。 在材料力學中, 莫耳圓是用來表現應力、 應變與慣性矩等二階張量在不同觀察座標系統下分量間的圖示關係。 在圖解操作中, 若觀察座標系統逆時針旋轉 $\theta $, 而我們直接將莫耳圓上座標點沿著圓周順時針轉 $2 \theta $, 就能得知新觀察座標系統下的應變、 應力與慣性矩分量。 由上述可知, 應力、 應變與慣性矩等物理量皆為滿足莫耳圓之二階張量。 若將此物理量透過莫耳圓的想法, 將二階張量分量轉為笛卡兒座標上的兩個位置向量, 以此二座標點為直徑的兩端點, 標示在 $x$-$y$ 座標上, 將滿足莫耳圓關係式, 亦即莫耳圓與二階張量間存在等價關係, 本文將對此有所證明。 單就數學角度思考, 張量係利用矩陣或分量方式做運算, 為在不同觀察座標系統下分量間滿足數學轉換的物理量。 單就數學運算過程做觀察, 無法了解其物理意義; 單就材料力學中莫耳圓圖解法剖析, 觀察分量轉變的笛卡兒座標位置向量於圓上位置轉動關係, 無法直觀的看出分量轉換或是矩陣操作關係。 事實上, 就數學方式(矩陣)、 物理方式(莫耳圓)描述張量, 是有相關的脈絡可循。 本文就二階張量與莫耳圓關係作探討, 介紹二階張量在不同觀察座標系統下分量間的轉換關係並推導出莫耳圓。 將二階張量以分量型、 矩陣型及莫耳圓等三種方式分別呈現, 並製表以利比較參考, 再由不變量與固有值問題來談材料力學中樑斷面強弱軸的物理意義。 最後, 利用 Mathematica 符號運算軟體, 製作相關動畫呈現, 以動態畫面表現張量的轉換關係, 提高學生學習興趣與改善教學效果。 2. 研究動機與目的許多教師受限於課時安排, 在工程數學授課時會跳過張量。 然而, 張量與工科學生必定接觸的莫耳圓概念卻緊密相連。 因此, 作者希望利用學生於大學時期同時學習張量與莫耳圓的機會, 將莫耳圓與張量整合並結合材料力學中應力、 應變觀念, 運用連貫的思考引導並將其以簡潔的表格呈現, 幫助學子更了解其思考脈絡。
工科學生, 在學靜力、 動力、 流力 最後, 利用 Mathematica 符號運算軟體的動畫製作功能, 將張量在不同觀察座標軸系統轉換下的分量變化與不變量驗核, 並以動畫方式呈現, 整合觀念, 將教學加入有趣的動畫元素, 期望提高學生理解能力及學習興趣。 表一:慣性矩相關公式
各力學領域相異符號表示如表二 表二:相異符號定義
3. 研究方法與步驟3.1. 問題描述高中物理課程中, 已經讓學生了解並學會如何依照公式來定義、 計算或量測慣性矩。 在靜力學課程中, 更深入的利用圖解法, 即是莫耳圓進行計算。 而於修習材料力學時, 又學習到應力與應變也可以利用莫耳圓分析。 因此, 筆者覺得很疑惑並開始思考 : 三種代表不同物理意義的物理量 (慣性矩、 應力與應變), 為什麼都可以利用相同的圖解法解題? 這三者在內涵上必有相關性。 再者, 這三個物理量的計算都牽涉到觀察座標系統選擇的問題, 也就是座標客觀性問題 (Objectivity), 亦即物理現象的觀察 (如材料破壞與否)應與觀察座標系統無關 (Frame of indifference)。 但是, 我們並不知道, 如果今天在一定觀察座標系統下所求出的應力、 應變及慣性矩分量, 在觀察座標系統改變(旋轉)後, 將其慣性矩、 應力與應變分量標記於莫耳圓上會如何變化, 或是其變化會依循什麼規律?
根據馮
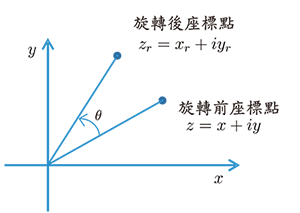
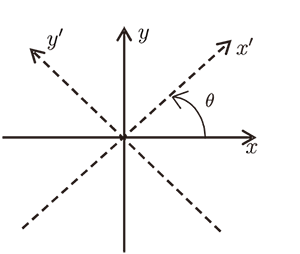
如圖一, 原始位置其座標為 \begin{equation} z=x+i y\label{3} \end{equation} 將原始位置之座標點向量乘以 $e^{i \theta }$, 再透過尤拉公式可得 \begin{equation} z_r=(x \cos \theta -y \sin \theta )+i(x \sin \theta +y \cos \theta ).\label{4} \end{equation} 將點旋轉 $\theta$ 後其新座標點 $x_r,y_r$ 以矩陣式表示如下: \begin{equation} \left[\begin{array}{c} x_r\\ y_r \end{array} \right]=\left[\begin{array}{ccc} \cos\theta&~&-\sin\theta\\ \sin\theta&&\cos\theta \end{array} \right]\left[\begin{array}{c} x\\ y \end{array} \right]=[Q_p(\theta)] \left[\begin{array}{c} x\\ y \end{array} \right],\label{5} \end{equation} 其中, \begin{equation} [Q_p(\theta)]=\left[\begin{array}{ccc} \cos\theta&~&-\sin\theta\\ \sin\theta&&\cos\theta \end{array} \right]\label{6} \end{equation} 即為點旋轉而以 $(x,y)$ 為座標觀察的轉換關係, 此矩陣符合旋轉矩陣 $[Q]$ 的定義 \begin{equation} [Q] [Q]^T=[Q]^T [Q]=[I_U ],\label{7} \end{equation} 其中, $[I_U ]=\left[\begin{array}{ccc} 1&~&0\\0&&1 \end{array} \right]$ 為單位矩陣。 此時的 $[Q_p]$ ($[Q_p]\in [Q]$)為位置向量逆時針旋轉 $\theta $。 而觀察座標系統不改變的情況下(僅有一個觀察座標系統 $(x,y)$), 點轉所呈現新舊座標之轉換矩陣。 下一章節, 我們將說明位置向量不變, 然而觀察座標不同所描述分量間的轉換關係。 因此, 本文係利用不同觀察座標系統的概念, 來描述這三個物理量(慣性矩、 應力與應變)各自分量間的相關性, 並連結觀察座標系統旋轉的概念, 分析、 解構莫耳圓與二階張量之關係。 3.2. 何謂張量3.2.1. 定義 為何應力、 應變與慣性矩在不同觀察座標系統下, 其分量改變都適用莫耳圓圖解法呢? 因為這三個物理量均屬二階張量(Tensor)。 何謂張量? 張量為純量、 向量或張量之間在不同觀察座標系統下的線性轉換關係。 簡單來說, 在不同觀察座標系統描述下, 其分量滿足某種轉換關係的物理量, 即可稱之為張量。 張量依其觀察座標系統旋轉時, 原物理量新舊分量間之轉換矩陣 $[Q_c]$ 的出現次數, 可分為零階、 一階、 二階與其他高階張量。 新舊座標系統轉換矩陣 $[Q_c]$ (Coordinate-transformation matrix)或稱旋轉矩陣(Rotation matrix), 即是在觀察座標系統旋轉, 而座標點位置向量不改變的情況下, 將新觀察軸 $(x',y')$ 與舊觀察軸 $(x,y)$ 間角度用餘弦關係所構成的矩陣表示:
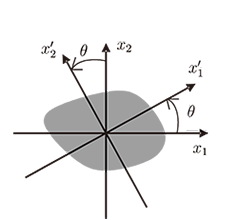
\begin{equation} [Q_c]=\left[\begin{array}{ccc} \cos(x',x)&~&\cos(x',y)\\ \cos(y',x)&&\cos(y',y) \end{array} \right];\label{8} \end{equation} \eqref{8} 式中, $(x',x)$ 代表 $x'$ 軸與 $x$ 軸之間的夾角。 如圖二, 若座標點不動, 觀察座標系統逆時針旋轉 $\theta$ 度, 其旋轉矩陣由 \eqref{9} 式可得: \begin{equation} [Q_c(\theta)]=\left[\begin{array}{ccc} \cos\theta&~&\sin\theta\\ -\sin\theta&&\cos \theta \end{array} \right].\label{9} \end{equation} 若將 $[Q_p ]$ 之 \eqref{6} 式與 $[Q_c ]$ 之 \eqref{9} 式比較會發現, 兩者皆為旋轉矩陣, 在此旋轉方向同為 $\theta $, 但呈現的旋轉矩陣卻不相同。兩者差別在於, $[Q_p ]$ 代表位置向量旋轉(觀察座標系統僅一個), 亦即觀察座標系統不變而點轉 $\theta$ 的轉換矩陣; $[Q_c ]$ 代表由觀察座標系統旋轉而來, 但座標點位置向量不轉動的轉換矩陣。 當位置向量逆時針旋轉, 以相對運動概念看來, 可視為位置不動而觀察座標系統為順時針旋轉, 故兩者可將 $\theta$ 用 $- \theta$ 互換之, 如下所示: \begin{equation} [Q_c(-\theta)]=\left[\begin{array}{ccc} \cos(-\theta)&~&\sin(-\theta)\\ -\sin(-\theta)&&\cos(-\theta) \end{array} \right]= \left[\begin{array}{ccc} \cos\theta&~&-\sin\theta\\ \sin\theta&&\cos \theta \end{array} \right]=[Q_p(\theta)].\label{10} \end{equation} 以下提及之旋轉矩陣, 均以描述張量之新舊觀察座標系統旋轉為主 $([Q_c ])$, 可將張量分類如下: 零階張量即為純量, 在觀察座標系統旋轉前後, 新舊分量之間不需經過旋轉矩陣轉換, 亦即不需考慮觀察座標系統之選擇。 無方向性, 只和大小相關, 如: 長度、 質量與能量。 一階張量則是向量, 在觀察座標旋轉後, 新舊分量間須經過一次旋轉矩陣 $[Q_c ]$ 的座標轉換。 其物理內涵必須包含方向及大小, 如: 力、 位移、 速度與加速度。 其一階張量(向量)分量之轉換關係式如下: \begin{equation} \left[\begin{array}{c} \bar x\\ \bar y\end{array} \right] =\left[\begin{array}{ccc} \cos\theta&~&\sin\theta\\ -\sin \theta&&\cos \theta\end{array} \right] \left[\begin{array}{c} x\\ y\end{array} \right].\label{11} \end{equation} 二階張量, 則是在觀察座標旋轉後, 必須經由兩次旋轉矩陣前乘 $[Q_c]$ 與後乘轉置 $[Q_c ]^T$ 轉換, 如: 應力、 應變與慣性矩。
根據陳 本文主要針對二階張量作探討, 將使用三種不同的表示式(矩陣型、分量型與莫耳圓型式), 呈現二階張量在不同觀察座標系統描述下, 新舊座標軸所描述分量間的轉換關係。 以及其觀察座標系統改變時, 莫耳圓的圓心、半徑與二階張量矩陣的跡與行列式值不變量的關係。 3.2.2. 分量的定義與張量關係 上一小節我們理解了張量的定義, 但是我們要怎麼判斷一個物理量是否為張量。 該物理量須滿足某些數學規範與要求, 不是所有的物理量皆是張量。 若是同樣描述慣性矩、 應力與應變, 其分量的定義若不合適, 就會使物理量不符合張量定義, 不能使用張量法則來運算。 如以下表三說明 表三:張量表示
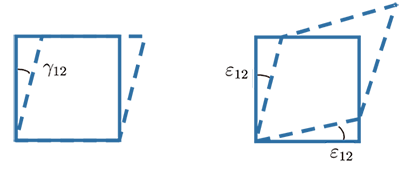
(*1)為 Timoshenko 所撰寫之材力參考書籍中對慣性矩的定義, 因其在 $I_{xy}$ 與 $I_{yx}$ 定義上少了負號, 因此沒有辦法滿足二階張量的轉換關係, 故該書中並沒有利用張量概念談材料力學中的慣性矩、 應力與應變。 (*2)彈性體受剪力作用後, 其工程剪應變為 $\gamma_{12}$; 而數學上定義的張量剪應變, 則是將 $\gamma_{12}$ 平分到兩個邊上的 $\varepsilon_{12}$, 因此, $\gamma_{12}=2\varepsilon_{12}$ (如圖三)。
如何判定是否為張量, 舉例說明如下: $(x_1,x_2)$ 為位置向量(一階張量), $(x_2,-x_1)$ 亦為位置向量(一階張量), 並與 $(x_1,x_2)$ 垂直之位置向量, $(x_1^2,x_2^2)$ 因其觀察座標旋轉後所得新座標點, 不符合一階張量運算法則, 故不是一階張量。 4. 二階張量的三種型式表示法4.1. 矩陣型式4.1.1. 矩陣表示法(以慣性矩為例) 在 $(x,y)$ 觀察座標系統下, 可將慣性矩的四個分量 $I_{xx}$、 $I_{xy}$、 $I_{yx}$、 $I_{yy}$ 寫成矩陣形式如下: \begin{equation} [I]=\left[\begin{array}{ccc} I_{xx}&~&I_{xy}\\ I_{yx}&&I_{yy}\end{array} \right].\label{21} \end{equation} 4.1.2. 觀察座標旋轉後分量間轉換關係
二階張量在觀察座標系統轉動後, 慣性矩分量亦跟著改變。
以圖二為例, 可得新舊分量轉換關係
\begin{eqnarray}
&&\hskip -20pt \left[\begin{array}{ccc} I_{\bar x\bar x}&~&I_{\bar x\bar y}\\ I_{\bar y\bar x}&&I_{\bar y\bar y}\end{array} \right]=
[Q_c]
\left[\begin{array}{ccc} I_{xx}&~&I_{xy}\\ I_{yx}&&I_{yy}\end{array} \right][Q_c]^T=
\left[\begin{array}{ccc} \cos\theta&~&\sin\theta\\ -\sin \theta&&\cos \theta\end{array} \right]
\left[\begin{array}{ccc} I_{xx}&~&I_{xy}\\ I_{yx}&&I_{yy}\end{array} \right]
\left[\begin{array}{ccc} \cos\theta&~&-\sin\theta\\ \sin \theta&&\cos \theta\end{array} \right]\nonumber\\
&\!=\!&
\left[\begin{array}{cc} \dfrac{I_{xx}\!+\!I_{yy}}{2}\!+\!\dfrac{I_{xx}\!-\!I_{yy}}{2}\cos 2\theta\!+\!I_{yx}\sin 2\theta&
\dfrac{-I_{xx}+I_{yy}}{2}\sin 2\theta+I_{xy}\cos 2\theta\\
\dfrac{-I_{xx}+I_{yy}}{2}\sin 2\theta+I_{yx}\cos 2\theta&
\dfrac{I_{xx}\!+\!I_{yy}}{2}\!-\!\dfrac{I_{xx}\!-\!I_{yy}}{2}\cos 2\theta\!-\!I_{xy}\sin 2\theta
\end{array} \right]\!\!,\quad~
\label{22}
\end{eqnarray}
此即杜等 4.2. 分量型式4.2.1. 分量表示法(以慣性矩為例)
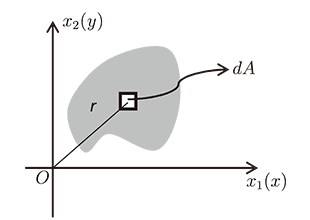
慣性矩分量, 可以愛因斯坦符號(Einstein symbol)表示如下:
\begin{equation}
I_{ij}=\displaystyle\int_A (r^2 \delta_{ij}-x_i x_j )dA,\label{23}
\end{equation}
其中, $i$ 與 $j$ 相互獨立。
二維時, $i,j$ 範圍均為 $1\sim 2$;
三維時, $i,j$ 範圍均為 $1\sim 3$。
$dA$ 為截面取一小元素面積;
$r$ 為各元素 $dA$ 形心到原點 $O$ 距離;
根據 Fung 4.2.2. 觀察座標系統旋轉前後關係
如圖四, 其中圖四(a)所求慣性矩為
$[I]=\left[\begin{array}{ccc} I_{11}&~&I_{12}\\ I_{21}&&I_{22}\end{array} \right]$。
此時, 若將觀察座標逆時針旋轉 $\theta $, 如圖四(b), 則會得到新的慣性矩
$[\bar I]=\left[\begin{array}{ccc} I_{\bar 1\bar 1}&~&I_{\bar 1\bar 2}\\ I_{\bar 2\bar 1}&&I_{\bar 2\bar 2}\end{array} \right]$。
依二階張量定義, $[\bar I]$ 與 $[I]$ 必滿足轉換矩陣運算(即方程式 \eqref{22}, 1 和 2 分別表示 $x$ 軸與 $y$ 軸), 以下將以分量形式證明。
座標軸旋轉後慣性矩根據 Sokolnikoff 當 $p=1,q=2$, 可得 \begin{equation} \bar I_{12}=\sum_{i=1}^2(l_{1i} l_{21} I_{i1}+l_{1i} l_{22} I_{i2})=\frac{-I_{11}+I_{22}}2 \sin 2 \theta +I_{12} \cos 2 \theta.\label{30} \end{equation} 因其對稱性 $I_{12}=I_{21}$, 故 $\bar I_{12}=\bar I_{21}$。 將慣性矩各分量分別計算以矩陣形式整理可得 \begin{eqnarray} [\bar I ]&\!=\!&\left[\begin{array}{ccc} \bar I_{11}&~&\bar I_{12}\\ \bar I_{21}&&\bar I_{22}\end{array} \right]\nonumber\\ &\!=\!&\left[\begin{array}{cc} \dfrac{I_{11}\!+\!I_{22}}{2}\!+\!\dfrac{I_{11}\!-\!I_{22}}{2}\cos 2\theta\!+\!I_{21}\sin 2\theta& \dfrac{-I_{11}+I_{22}}{2}\sin 2\theta+I_{12}\cos 2\theta\\ \dfrac{-I_{11}+I_{22}}{2}\sin 2\theta+I_{21}\cos 2\theta& \dfrac{I_{11}\!+\!I_{22}}{2}\!-\!\dfrac{I_{11}\!-\!I_{22}}{2}\cos 2\theta\!-\!I_{12}\sin 2\theta \end{array} \right].\qquad~\label{31} \end{eqnarray} 上述所得與矩陣運算式 \eqref{22} 相同。
4.3. 莫耳圓型式4.3.1. 莫耳圓(以慣性矩為例)
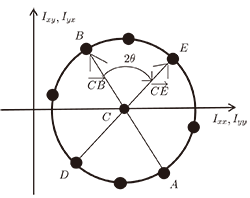
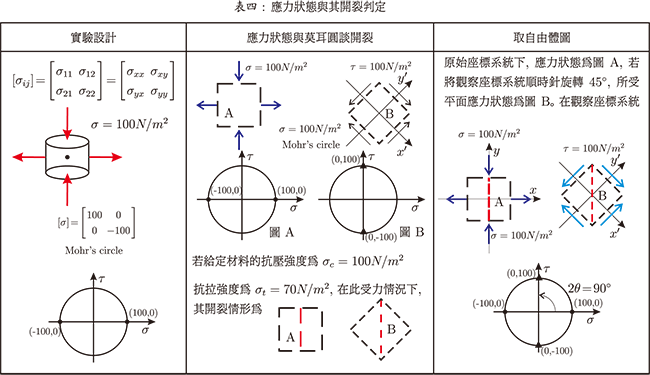
針對慣性矩矩陣 $[I]=\left[\begin{array}{ccc} I_{xx}&~&I_{xy}\\ I_{yx}&&I_{yy}\end{array} \right]$, 將莫耳圓中各點座標分列如下 \begin{eqnarray} &&\hskip -25pt \left\{\begin{array}{l} A=(I_{yy},-I_{yx}),\\ B=(I_{xx},I_{xy}),\end{array}\right.\label{32}\\ &&\hskip -17pt C=\Big(\frac{(I_{xx}+I_{yy})}2,\frac{(I_{xy}-I_{yx})}2\Big)= \Big(\frac{(I_{xx}+I_{yy})}2,0\Big)=\Big(\frac{(I_{\bar x\bar x}+I_{\bar y\bar y})}2,0\Big),\label{33}\\ &&\hskip -25pt \left\{\begin{array}{l} D=(I_{\bar y\bar y},-I_{\bar y\bar x}),\\ E=(I_{\bar x\bar x},I_{\bar x\bar y}), \end{array}\right.\label{34}\\ &&\hskip -17pt \overrightarrow{CB}=\Big(\frac{(I_{xx}-I_{yy})}2,I_{xy}\Big),\label{35}\\ &&\hskip -17pt \overrightarrow{CE}=\Big(\frac{(I_{\bar x\bar x}-I_{\bar y\bar y})}2,I_{\bar x\bar y}\Big).\label{36} \end{eqnarray} 要建構莫耳圓, 必須要知道相關座標訊息。 在原始觀察座標系統下, 其慣性矩矩陣為 $\left[\begin{array}{ccc} I_{xx}&&I_{xy}\\ I_{yx}&&I_{yy}\end{array} \right]\!\!;$ 以旋轉後觀察座標系統來看, 其慣性矩為 $\left[\begin{array}{ccc} I_{\bar x\bar x}&~&I_{\bar x\bar y}\\ I_{\bar y\bar x}&&I_{\bar y\bar y}\end{array} \right]$。 再依照 \eqref{32} 與 \eqref{34} 式, 於笛卡兒座標二維平面上, 點出 $A$、 $B$、 $D$ 與 $E$ 等四個座標點, 再各以 $A$、 $B$ 與 $D$、 $E$ 兩點間距離為直徑畫圓, 即可求得該觀察座標系統下的莫耳圓詳見圖五。 而莫耳最大的貢獻即在於, $\overrightarrow {AB}$ 與 $\overrightarrow {DE}$ 兩相異向量, 卻為同一個莫耳圓上的直徑向量, 亦即 $A$、 $B$、 $D$、 $E$ 點分佈在莫耳圓的圓周上。 這就如孫悟空(慣性矩、應力與應變)逃不出如來佛(莫耳)的手掌心(莫耳圓)一般, 二階張量在觀察座標系統改變(旋轉)前後, 將其四個分量看成兩個位置向量繪於笛卡兒座標上, 皆在同一個莫耳圓的圓周上。 4.3.2. 觀察座標旋轉後關係 莫耳圓與二階張量之關係, 是本文探討重點。 從莫耳圓可引導出其他相關概念, 如分量之變化關係與張量中的不變量之決定問題, 因此將對此做詳盡解說。 觀察座標系統旋轉後關係證明, 係利用上述分量形式與矩陣形式所推導出的慣性矩分量表示式, 再加以延伸推廣。 先將 $I_{\bar x\bar x}$ 與 $I_{\bar y\bar y}$ 相減並除以 2 得 \begin{equation} \frac 12 (I_{\bar x\bar x}-I_{\bar y\bar y})=\frac 12 [(I_{xx}-I_{yy} )\cos 2 \theta +2I_{xy} \sin 2 \theta ],\label{37} \end{equation} 再與 $I_{\bar x\bar y}$ 見 \eqref{22} 式以矩陣方式結合, 可得 \begin{equation} \left[\begin{array}{c} \dfrac 12 (I_{\bar x\bar x}-I_{\bar y\bar y} )\\ I_{\bar x\bar y}\end{array} \right]= \left[\begin{array}{ccc} \cos 2 \theta &~&\sin 2 \theta\\-\sin 2 \theta &&\cos 2 \theta\end{array} \right] \left[\begin{array}{c} \dfrac 12 (I_{xx}-I_{yy} )\\ I_{xy}\end{array} \right].\label{38} \end{equation} \eqref{38} 式的左式與右式, 恰為在新舊觀察座標系統下, $\overrightarrow{CE}$ 與 $\overrightarrow{CB}$ 的向量(見圖五), 其轉換矩陣角度為順時針轉 $2 \theta $, 亦即 $[Q_P (-2 \theta )]$。 因此, 我們可以發現, 莫耳圓形式係將二階張量的觀察座標系統旋轉, 轉換為一階張量(向量)旋轉運算。 當新觀察座標系統"逆"時針旋轉"$\theta$", 莫耳圓上新座標點會沿著圓周"順"時針移動"$ 2 \theta$"。 4.4. 莫耳圓形式(應力與應變)除了慣性矩以外, 河工系與土木系學生感興趣的, 還有結構桿件斷面受力彎曲時產生的應力及應變。 彈性體在受外力作用下, 所產生的位移、 變形與應力應變, 這些都是工程師在工程問題關注的重點, 希能從中尋找強軸以抗彎矩 (最佳 I 值, 如工字樑或 I 型樑) 或使應力反應減低的設計, 減少材料用量及增加結構系統的安全係數。 4.4.1. 莫耳圓(以應力為例)
\begin{equation}
[\sigma _{ij}]=\left[\begin{array}{ccc} \sigma_{xx}&~&\sigma _{xy}\\
\sigma _{yx}&&\sigma _{yy}\end{array} \right].\label{39}
\end{equation}
當 $i=j$ 時, 為正向應力, 材料力學上常以 $\sigma$ 表示;
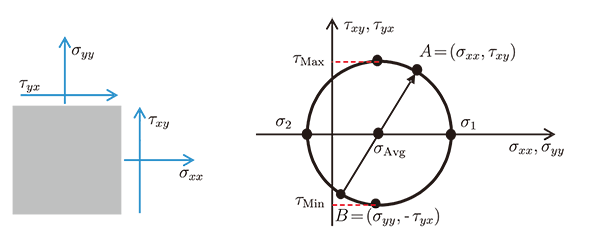
當 $i\not=j$ 時, 為剪應力, 材料力學中常以 $\tau$ 表示, 參考圖六, 莫耳圓中 $A$、 $B$ 兩點座標如下(參考圖七):
\begin{equation}
\left\{\begin{array}{l}
A=(\sigma _{xx},\tau _{xy}),\\
B=(\sigma _{yy},-\tau_{yx}),
\end{array} \right.\label{40}
\end{equation}
莫耳圓半徑 $R$ 可寫成
\begin{equation}
R=\sqrt{\Big(\frac{\sigma_{xx}+\sigma_{yy}}2\Big)^2+ \tau_{xy}^2}=\frac{\sigma_1-\sigma_2}2.\label{41}
\end{equation}
依據 Chou
4.4.2. 觀察座標系統旋轉後應力分量關係 應力與應變都是取自由體圖後的某一元素進行觀察與判斷, 此時所取自由體圖的角度會影響應力分量。 如圖五所示, 是將觀察座標軸逆時針旋轉 $\theta $, 相對看來就是座標點順時針轉動 $\theta $。 依據 4.3 小節裡證明可以得知, 觀察座標軸的旋轉方向與莫耳圓上座標的旋轉方向相異。 因此圖五中莫耳圓的座標向量為順時針旋轉 $2 \theta $。 這是在應用莫耳圓求解應力與應變時, 要特別注意的地方。 解題時必須先判斷是座標軸旋轉或是物體(質點)旋轉的情況, 才能在莫耳圓上做出正確判斷。 在了解應力與應變如何計算後, 其一實際工程應用為判斷開裂失效情形。 開裂失效現象, 是結構系統失效模式之一。 當物體所受應力狀態大於其抗壓或抗拉強度, 就會使結構產生破壞。 在鋼筋混凝土(RC)結構上混凝土開裂是嚴重問題, 開裂會使得水分侵蝕主要的結構元素 --- 鋼筋。 當鋼筋產生鏽蝕, 會影響整體結構物的安全性, 尤其是位於地震帶的台灣, 開裂問題的影響更為嚴重。 開裂方向的判斷, 與應力狀態有關, 描述開裂與否要有客觀性, 如表二所示。 材料開裂與否和方向不會隨著所取自由體圖的不同, 而有所不同。 當一個試體, 其抗壓強度為 $\sigma_c\!=\!100N/m^2$; 抗拉強度為 $\sigma _t=70N/m^2$, 承受 $100N/m^2$ 的壓力及拉力時, 其開裂絕對位置不變, 詳見表四。 5. 二階張量與莫耳圓關係莫耳圓看似簡單, 卻包含許多概念。最為基本的概念之一為, 無論觀察座標系統如何改變, 其莫耳圓半徑皆相同。 更甚者, 其圓周與 $x$ 軸的交點, 都有代表的物理內涵, 以上皆為本節探討一大重點。 5.1. 不變量的驗核 (以慣性矩為例)在莫耳圓上的不變量有兩個部分, 以下將會對此分別證明。 \begin{eqnarray} I_{xx}+I_{yy}\ &=&\ I_{\bar x\bar x}+I_{\bar y\bar y}\ =\hbox{常數(圓心位置不變)},\label{43}\\ \left[\begin{array}{ccc} I_{xx}&~&I_{xy}\\ I_{yx}&&I_{yy}\end{array} \right]&=& \left[\begin{array}{ccc} I_{\bar x\bar x}&~&I_{\bar x\bar y}\\ I_{\bar y\bar x}&&I_{\bar y\bar y}\end{array} \right] =\hbox{常數(行列式值不變).}\label{44} \end{eqnarray} 因為觀察座標旋轉前後, 產生的莫耳圓相同, 故圓心位置不改變, 且半徑亦相同。 因此, 以下將就 (1) 圓心不變(跡不變), (2) 行列式值不變, (3) 半徑不變等三個證明分別敘述如下: 5.1.1. 圓心不變 利用4.1.2所證, 將 $I_{\bar x\bar x}$ 和 $I_{\bar y\bar y}$ 相加, 即可得 \begin{equation} \frac{(I_{\bar x\bar x}+I_{\bar y\bar y})}2=\frac{(I_{xx}+I_{yy})}2.\label{45} \end{equation} 上式表示莫耳圓上的圓心, 不會因觀察座標系統的旋轉而改變。 而就矩陣而言, 對角線項相加稱為該矩陣之跡 (Trace), 亦即跡是不變量。 5.1.2. 行列式值不變 利用矩陣運算基本定理, 以二階張量的轉換表現式 \eqref{20} 式進行證明。 旋轉矩陣 $Q$ 為正交矩陣, 即轉置矩陣與反矩陣相同 $[Q] [Q]^T=[Q]^T [Q]=[I_U ]$, 行列式值為 1, 如下 \eqref{46} 式所示: \begin{equation} \det[Q]=\cos^2\theta +\sin^2\theta =1.\label{46} \end{equation} 若將 \eqref{20} 式所有矩陣取行列式值, 會得到結果如下 \begin{equation} \det[\bar I ]=\det[Q]\det[I]\det[Q]^T=\det[I].\label{47} \end{equation} 由 \eqref{47} 式可清楚的理解, 觀察座標軸旋轉前後的慣性矩矩陣元素, 將其以矩陣表示法呈現, 其行列式值不變。 5.1.3. 半徑不變 我們將運用 5.1.1 與 5.1.2 兩個結果來證明, 並推導觀察座標系統旋轉前後半徑是否改變。 在原始觀察座標系統下, 利用畢氏定理, 可列式如下: \begin{equation} R^2=\Big[\frac 12(I_{xx}-I_{yy})\Big]^2+I_{xy}^2.\label{48} \end{equation} 將其展開重整: \begin{eqnarray} R^2&=&\frac 14 (I_{xx}^2+I_{yy}^2-2I_{xx} I_{yy})+I_{xy}^2\nonumber\\ &=&\frac 14 (I_{xx}+I_{yy})^2-I_{xx} I_{yy}+I_{xy}^2.\label{49} \end{eqnarray} 觀察座標軸旋轉後, 其半徑平方 \begin{equation} \bar R^2=\Big[\frac 12(I_{\bar x\bar x}-I_{\bar y\bar y})\Big]^2+I_{\bar x\bar y}^2,\label{50} \end{equation} 展開重新整理後得 \begin{eqnarray} \bar R^2&=&\frac 14 (I_{\bar x\bar x}^2+I_{\bar y\bar y}^2-2I_{\bar x\bar x} I_{\bar y\bar y})+I_{\bar x\bar y}^2\nonumber\\ &=&\frac 14 (I_{\bar x\bar x}+I_{\bar y\bar y})^2-I_{\bar x\bar x} I_{\bar y\bar y}+I_{\bar x\bar y}^2.\label{51} \end{eqnarray} 由上述關係可看出, 當圓心不變見 \eqref{45} 式, 行列式值相同如 \eqref{47} 式, 比較 \eqref{50} 式與 \eqref{51} 式, 可得證 $R=\bar R$, 故半徑不變。 5.2. 固有值與固有向量
在莫耳圓與 $x$ 軸相交的兩點具特別的物理意義。
就慣性矩來看, 那兩端點 $x$ 座標為強、 弱軸對應的慣性矩 $(I_1,I_2)$;
就應力來看, 是無剪應力的最大與最小主應力值 $(\sigma_1,\sigma_2)$;
就應變來說, 是無剪應變產生, 只有最大與最小主應變的點 $(\varepsilon_1,\varepsilon_2)$, 是工程分析重要的指標。
若給定任意一個慣性矩矩陣、應力或應變狀態, 可藉由矩陣的固有特性求得其主應力、 主應變及強弱軸。
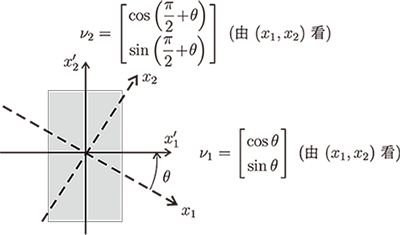
根據 Lee 等
根據圖八, 利用 \eqref{9} 式, 配合圖八可得其轉換公式為 \begin{equation} [Q(\theta)]=\left[\begin{array}{ccc} \cos \theta &&\cos\Big(\dfrac \pi 2- \theta \Big)\\ \cos\Big(\dfrac \pi 2+\theta \Big)&&\cos \theta\end{array} \right] =\left[\begin{array}{ccc} \cos \theta &&\sin \theta \\-\sin \theta &&\cos \theta\end{array} \right]. \label{57} \end{equation} 依二階張量之轉換關係 \begin{equation} [\bar I ]=[Q][I] [Q]^T.\label{58} \end{equation} 依張量定義 $[Q]$ 為正交矩陣, 依 \eqref{55} 式將 $[I]$ 做固有值分析可得 \begin{equation} \left\{\begin{array}{l} {[I]} \nu_1=\lambda _1 \nu_1\\ {[I]} \nu_2=\lambda _2 \nu_2 \end{array}\right..\label{59} \end{equation} 而根據固有值分析的對角化公式可得 \begin{equation} [I]=[P][D] [P]^{-1},\label{60} \end{equation} 其中, $[P]$ 為固有向量所構成的矩陣 \begin{equation} [P]=[\nu _1\ \nu _2].\label{61} \end{equation} 要注意的是 $\nu_1,\nu _2$ 要以單位向量表示。 $[D]$ 為固有值 $(\lambda _1,\lambda _2 )$ 所建構的對角矩陣 \begin{equation} [D]=\left[\begin{array}{ccc} \lambda_1&~0\\ 0&~\lambda _2\end{array} \right]=[\bar I ].\label{62} \end{equation} 又因慣性矩矩陣 $[I]$ 為對稱矩陣, 故 $[P]$ 為正交矩陣 \begin{equation} [P]^{-1}=[P]^T.\label{63} \end{equation} 因此將 \eqref{60} 式整理可得 \begin{equation} [D]=[P]^T [I][P].\label{64} \end{equation} 若旋轉後座標軸位於斷面強軸與弱軸上, 則 $[\bar I ]$ 為對角矩陣, 故可得到下列關係式 \begin{equation} [\bar I ]=[D].\label{65} \end{equation} 由 \eqref{58} 式與 \eqref{64} 式可看出 \begin{eqnarray} [Q]&=&[P]^T,\label{66}\\ {[P(\theta )]}&=&[Q(- \theta )],\label{67} \end{eqnarray} 故將 \eqref{57} 式以 $(- \theta )$ 代入, 可得 $[P]$ 如下: \begin{equation} {[P]}=\left[\begin{array}{ccc} \cos \theta &&-\sin \theta \\\sin \theta &&\cos \theta\end{array} \right]= \left[\begin{array}{ccc} \cos \theta &&\cos\Big(\dfrac \pi 2+\theta \Big) \\[6pt] \sin \theta &&\sin\Big(\dfrac \pi 2+\theta \Big)\end{array} \right] =[\nu_1\ \nu_2].\label{68} \end{equation} 再經由 \eqref{61} 式定義可知 \begin{equation} \nu_1=\left[\begin{array}{c} \cos\theta\\ \sin\theta \end{array} \right];\qquad \nu_2=\left[\begin{array}{c} \cos\Big(\dfrac \pi 2\!+\!\theta \Big)\\[6pt] \sin\Big(\dfrac \pi 2\!+\!\theta \Big) \end{array} \right]. \label{69} \end{equation} 故新觀察座標系統下的旋轉矩陣 $[Q]$ 為固有向量 $[P]$ 的轉置矩陣 \begin{equation} [\bar I ]=[Q][I] [Q]^T=[D],\qquad [I]=[Q]^T [\bar I ][Q]=[P][\bar I ] [P]^T.\label{70} \end{equation} 參考文獻---本文作者陳正宗任教國立臺灣海洋大學河海工程學系, 李家瑋任教淡江大學土木工程學系, 凃雅瀞投稿時就讀國立臺灣海洋大學河海工程學系--- |
2019年12月 43卷4期
莫耳圓與二階張量關係之研究及其 Mathematica 動畫模擬 (上)